| frc2019.robot.Robot |
Initializes Robot |
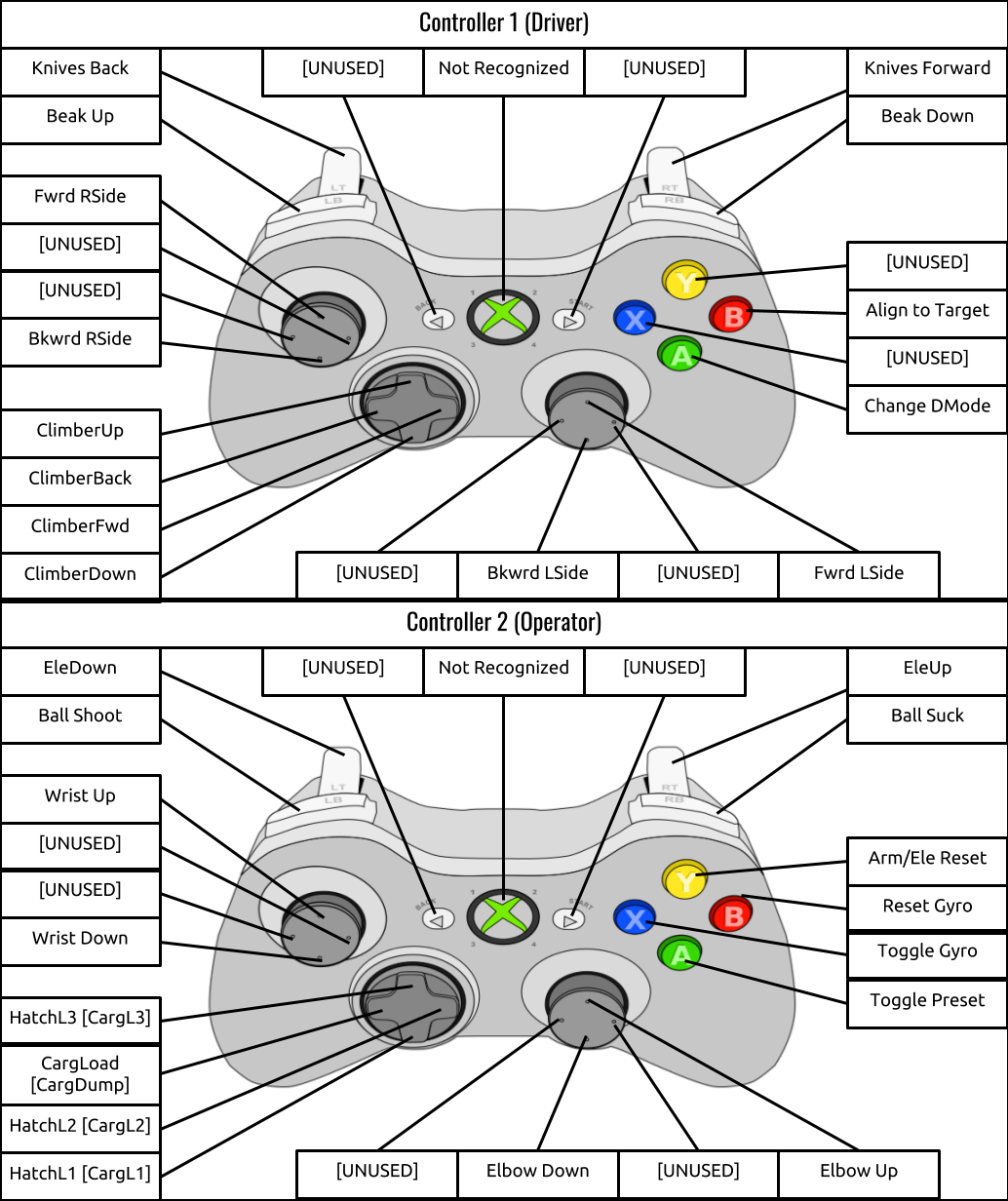
| frc2019.robot.OI |
Assigns buttons to Controller |
| frc2019.robot.Main |
Starts all Robot Subsystems |
| frc2019.robot.RobotMap |
Defines Motor Controller IDs and Constants |
| frc2019.robot.commands.AlignTurn |
Turns the Robot using vision from GRIP |
| frc2019.robot.commands.ArticulateToPreset |
Sets Arm to a Preset Position |
| frc2019.robot.commands.AutoClimb |
Automatically drives Climbers (WIP) |
| frc2019.robot.commands.ElevateToPreset |
Sets Elevator to a Preset Position |
| frc2019.robot.commands.test.DriveTrainRampTest |
Soon to be erased from existence. |
| frc2019.robot.commands.test.DriveTrainTest |
Soon to be erased from existence. |
| frc2019.robot.commands.presets.Cargo |
[UNDER CONSTRUCTION] |
| frc2019.robot.commands.presets.LevelOne |
[UNDER CONSTRUCTION] |
| frc2019.robot.commands.presets.LevelThree |
[UNDER CONSTRUCTION] |
| frc2019.robot.commands.presets.LevelTwo |
[UNDER CONSTRUCTION] |
| frc2019.robot.commands.defaults.Articulate |
Moves the Arm (Manipulator at End) |
| frc2019.robot.commands.defaults.Climb |
Drives the Tower Mechanism |
| frc2019.robot.commands.defaults.Drive |
Drives the Robot |
| frc2019.robot.commands.defaults.Elevate |
Moves the Elevator (Contains Arm) |
| frc2019.robot.commands.defaults.Erect |
Moves the Erector (Climber) |
| frc2019.robot.commands.defaults.Manipulate |
Moves the Manipulator (Cargo Shovel) |
| frc2019.robot.commands.defaults.Speak |
Moves the Beak on the Arm (Hatch Panel Hook) |
| frc2019.robot.subsystems.Arm |
Defines the Arm (Moves Manipulator) |
| frc2019.robot.subsystems.CargoManipulator |
Defines the Cargo Manipulator |
| frc2019.robot.subsystems.Climber |
Defines the Climber (Tower Mechanism) |
| frc2019.robot.subsystems.DriveTrain |
Defines the Drive Train |
| frc2019.robot.subsystems.Elevator |
Defines the Elevator (Contains Arm) |
| frc2019.robot.subsystems.Erector |
Defines the Erector (Climber) |
| frc2019.robot.subsystems.Hatch |
Defines the Hatch Panel Mechanism (Beak) |
| frc2019.robot.utilities.Drivable |
Interface for various Subsystems |
| frc2019.robot.utilities.FunctionWrapper |
Interface for FunctionCommand |
| frc2019.robot.utilities.FunctionCommand |
Abstraction Stuff |